1-866-SDRobot (866-737-6268)


ATR Mechanical Description
2nd Generation
See our prepackaged ATR Kits or Contact Us for a custom designed/built special purpose ATR
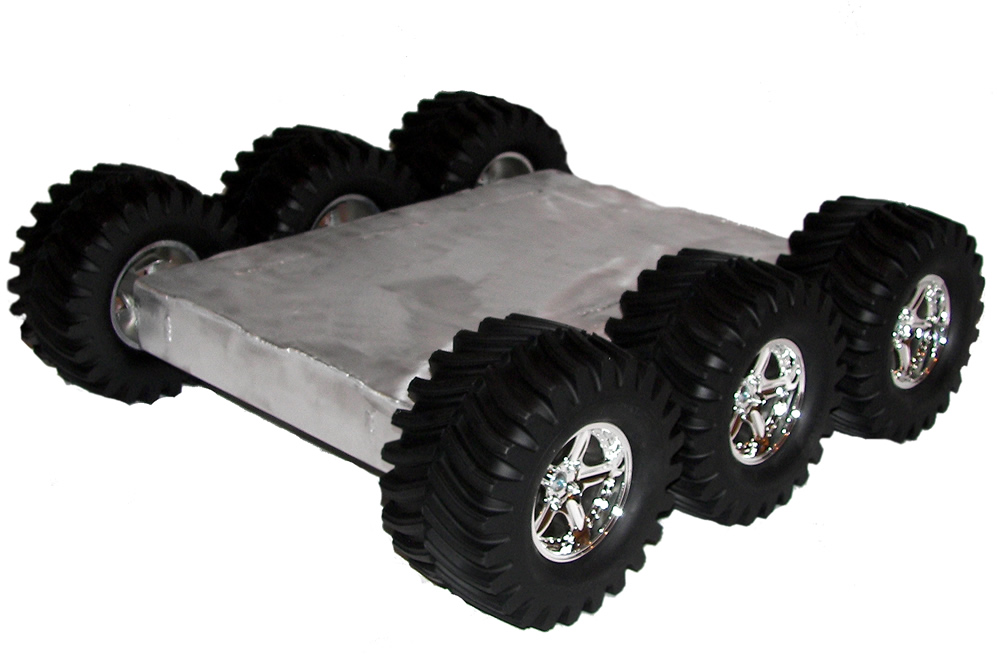
General Description
This is a robot that utilizes four or six super swamper tires, standard tires, or omni-wheels to to drive over just about any terrain. It works on any indoor surface and most outdoor surfaces (check out the hill climbing video and curb climbing videos on our main ATR page. Below are the links to different parts you can add onto the robot platform to customize it to your needs. |
 |
| 4WD All Terrain Robot Robot | 6WD All Terrain Robot Robot |
View a SolidWorks EDrawing to see a 3D image of the robot. You can manipulate the model and see all the pieces from every orientation. A simple way to see all the views is to hit play and it will automatically rotate the robot around for you so you can see all the views. Please note our models are done to a level of completion to get the parts made and metal cut. We do not waist our time showing hardware, bearings, and other useless frill... Solidworks Free Viewer Download Link.
IG32 and IG42 Robot Platform EDrawings (128kb zip file)
Platform
There are two standard platforms. One for the IG32 motors, another for the IG42 motors. The same chassis is used for 4WD or 6WD, on the 4WD version, the middle wheels are just omitted and can be added later. The platform is all laser cut aluminum. The aluminum is then welded together for a solid chassis.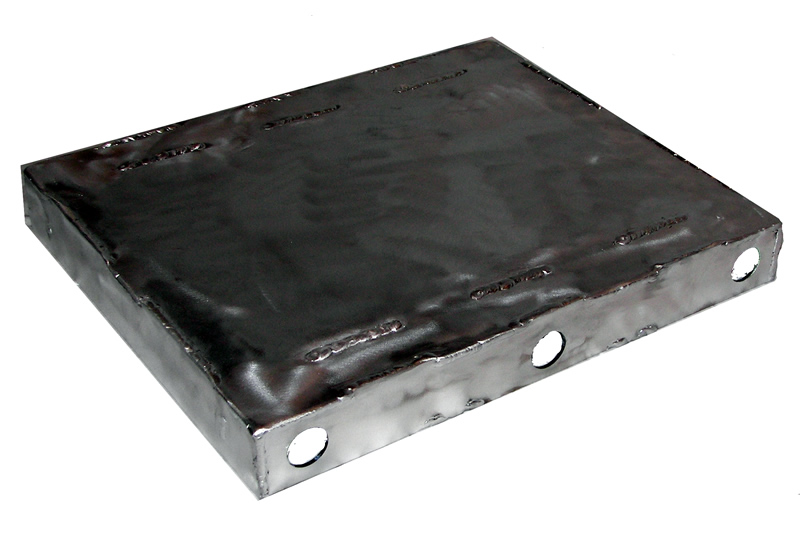
- ATR wheel and� shaft set combo : 2.9 lbs
- Omni-Wheel shaft combo (single row): 1.3 lbs
- Omni-Wheel shaft combo (double row): 1.8 lbs
Motors and Motor Mounts
Many different motor sizes are available for this kit. The IG32P sized motor is recommended for most applications and will drive the robot over any indoor surface and most outdoor surfaces. The IG32 motors will work fine too depending on how much weight you plan on stacking on the robot (if >10 lbs the medium or larger motors should be used). The larger IG42 motors are overkill for indoor stuff, but can be used if you want ultimate power. If you want to climb hills and curbs you should use the large IG42 motors.Click on image for a larger view

|
For the standard ATRs the motors are mounted to the base via pre-drilled holes to a motor mounting plate that then connects to predrilled holes on the ATR platform. |

Top Isometric View |

Bottom Isometric View |
- 24VDC IG32 195 RPM Gear Motor (~7.5kg-cm stall Torque)
- 24VDC IG32P 190 RPM Gear Motor (~35kg-cm stall Torque)
- 24VDCIG42 252 RPM Gear Motor (~75kg-cm stall Torque)
Wheels and Drive Shafts
The ATR wheels and shafts are sold together as one unit. The wheels are also sold in sets of 2 since the tread is matched for the large wheels. The shaft comes with a bearing and lock collars that fit right into/onto the motors and motor mounts. The ATR wheels are 6.75 inches in diameters. Since all 4 wheels are driven and steering is done by controlling the speed/direction of the motors (AKA skid steering) the wheels need to slip to turn, so on indoor surfaces this is sometimes not he best option. If smaller motors are used sometimes tuning is very difficult (i.e. the wheels get good traction and load up the motors). Slow turns are not so much an issue as turning one side forward and turning the other side reverse to get a pivot turn. To overcome this the omni wheels are a better choice for flat high traction indoor surfaces. If you are ordering ATR wheels, you only need 2 sets (for a total of 4 wheels and shafts) for a typical 4WD assembly.The Omni wheels and shafts are also sold together as one unit. The shaft comes with a bearing and lock collar that fit right into/onto the motors and motor mounts. The wheels are 4" in diameter. The traction wheels are made of durable urethane to help grip the floor. These wheels also work outdoors. The wheels are either single row wheels or double row wheels. The double row wheels provide a little smoother operation, but both work great. One thing to note with the omni wheels is if you run sideways to a hill, the wheels will side slip down the hill, but if the robot angles up the hill slightly it can overcome this. If you are ordering omni wheels, you will need 4 individual shaft and wheel sets for a 4WD robot.
- ATR wheel and shaft set combo
- Omni-Wheel shaft combo (single row)
- Omni-Wheel shaft combo (double row)
Hardware
The final item you need to make you kit complete is a hardware package.It includes nuts, bolts washers, nylon spacers (for isolating your electronics and controller boards), cable ties, and cable hold downs.
- Hardware Package (mounts most components to the base robot base).
- All-Thread hardware kit (used to support/space out the platforms if multiple platforms are used.
- Servo Standoff Hardware Package (used to mount servos onto the base of the robot).
