1-866-SDRobot (866-737-6268)


Motor Controller Comparison & Support
A motor controller takes a low current low voltage input signal and drives a motor with higher voltages and currents. The input signal can be serial, I2C, RC input, PWM, etc. Listed below are the many types of motor controllers we carry with a brief explanation of each one. For full details of each motor controller go to the item page. Each motor controller item page has supporting links to data sheets, manuals, etc.Motor Controller |
Capacity and Voltage |
Control Inputs |
Size |
Other Features |
 SDR PWM Motor Controller |
Single Channel, 12-55VDC, 3 Amp motor controller. It can take spikes greater than this, but its fused at 3 Amps slow blow fuse. | PWM input (a simulated 0-5V output from a microcontroller). Also needs input for direction and brakes. | 1.25in x 2.5in |
Brake and direction have pull down resistors on them so you do not have to hook up IO to them if you don't wish to use them. We offer hookup kits for these: PWM to PIC Hookup Kit |
 Sabertooth 2x5 |
Dual Channel, 6-18VDC, 5 Amp Continuous/10A Peak Power Rating
per channel. |
Analog voltage, radio control, serial and packetized serial. Sabertooth has independent and speed + direction operating modes, making it the ideal driver for differential drive (tank style) robots and more. | 1.8 x 1.6 x .5 in 45 x 40 x 13 mm |
|
 Sabertooth 2x12 RC |
Dual Channel, 24VDC 12 Amp Continuous/25A Peak Power Rating
per motor. |
Radio control only. Sabertooth has independent and speed + direction operating modes, making it the ideal driver for differential drive (tank style) robots and more. | 2.3 x 3 x .7 in 59 x 75 x 17 mm |
This motor controller has a 1 Amp Switching BEC, which is very useful power the 2.4GHz receivers (that draw about 130mA during sync). |
 Sabertooth 2x12 |
Dual Channel, 24VDC 12 Amp Continuous/25A Peak Power Rating per motor. | Analog voltage, radio control, serial and packetized serial. Sabertooth has independent and speed + direction operating modes, making it the ideal driver for differential drive (tank style) robots and more. | 2.3 x 3 x .7 in 59 x 75 x 17 mm |
This motor controller has a 1 Amp Switching BEC, which is very useful power the 2.4GHz receivers (that draw about 130mA during sync). |
 SaberTooth 2x25 |
24VDC 25 Amp continuous per motor. Dual Channel so it handles two motors at 25 amps each. Peak currents of 50A per channel are achievable for a few seconds. | Analog voltage, radio control, serial and packetized serial. Sabertooth has independent and speed + direction operating modes, making it the ideal driver for differential drive (tank style) robots and more. | 2.6 x 3.2 x .8 in 65 x 80 x 20 mm |
|
 Custom RC SaberTooth 2x25 |
24VDC 25 Amp continuous per motor. Dual Channel so it handles two motors at 25 amps each. Peak currents of 50A per channel are achievable for a few seconds. | Analog voltage, radio control, serial and packetized serial. Sabertooth has independent and speed + direction operating modes, making it the ideal driver for differential drive (tank style) robots and more. | 2.6 x 3.2 x .8 in 65 x 80 x 20 mm |
This motor is the same as a standard 2x25 except the controller has a 1 Amp Switching BEC, which is very useful power the 2.4GHz receivers (that draw about 130mA during sync). |
 Sabertooth Dual 60A |
2 Channel, 60A continuous per channel, 120A peak per channel. 6-30V nominal, 33.8V absolute maximum. |
Analog voltage, radio control, serial and packetized serial. Sabertooth has independent and speed + direction operating modes, making it the ideal driver for differential drive (tank style) robots and more. | 3.0 x 3.5 x 1.8 in 76 x 89 x 46 mm |
This motor controller has a 1 Amp Switching BEC, which is very useful power the 2.4GHz receivers (that draw about 130mA during sync). Thermal and overcurrent protection Lithium protection mode. |
 SyRen 1x10 |
Singel Channel, 12-24VDC, 10 Amp Continuous/15A Peak Power Rating. |
Analog voltage, radio control, serial and packetized serial. | 1.4 x 2.25 x .6 in 35 x 57 x 14 mm |
|
 SyRen 1x25 |
Singel Channel, 12-24VDC, 25 Amp Continuous/45A Peak Power Rating. |
Analog voltage, radio control, serial and packetized serial. | 2.4 x 2.3 x .8 in 61 x 58 x 21 mm |
|
 Devantech MD22 Dual Channel Speed Controller |
Dual Channel Motor Controller. 5-24VDC 5 Amps per motor, but with added heat sinks it can handle 27Amp continuous with a suitable heat-sink and up to 290Amps in very brief repetitive pulses | The MD22 has Multiple methods of control: I2C, servo pulse input, PWM. MD22 has independent and speed + direction operating modes, making it the ideal driver for differential drive (tank style) robots and more. | 110mm x 52mm x 25mm | The MD22 does not have a regulator on it, a separate 5Vsource must be supplied to power the board. |
 Devantech MD03 Speed Controller |
Single Channel. As supplied it can handle 20A current capacity for 5V to 24V motors and up to 290Amps in very brief repetitive pulses. | The MD03 has Multiple methods of control: I2C, servo pulse input, PWM. | 110mm x 52mm x 25mm | The MD22 does not have a regulator on it, a separate 5Vsource must be supplied to power the board. |
 RoboteQ AX500 - 2x15A Brushed DC Motor Controller |
12V to 24V DC. Dual 15A motor controller for 30 seconds. >30A per side for short bursts. | Radio Control Input, Serial Input, Analog Input | 4.2in (106mm) wide x 2.9in (50mm) long x 1.5in tall (38mm) tall including heat sink | Forward & Reverse Speed Control. Separate or Mixed. |
 RoboteQ AX1500 - 2x30A Motor Controller |
12V to 40V DC. Dual 30A motor controller for 30 seconds. >150A per side for short bursts. | Radio Control Input, Serial Input, Analog Input | 4.2in (106mm) wide x 4.2in (106mm) long x 1.5in tall (38mm) tall including heat sink | Forward & Reverse Speed Control. Separate or Mixed. |
 RoboteQ AX3500 - 2x60A Motor Controller with Encoder Input |
12V to 40V DC. Dual 60A motor controller for 30 seconds. >250A per side for short bursts. | Radio Control Input, Serial Input, Analog Input | 4.2in Wide (106mm) 6.75in Long (172mm) 1.2in High (30mm) |
Forward & Reverse Speed Control. Separate or Mixed. Encoder Input for Speed and Position Control |
 RoboteQ SDC2130 - 2x20A 30V Motor Controller with Encoder Input |
12V to 30V DC. Dual 20A motor controller for 30 seconds. >50A per side for short bursts. | Radio Control Input, Serial Input, Analog Input | 2.6in (70mm) wide x 2.6in (70mm) tall x 0.75in (19mm) | Forward & Reverse Speed Control. Separate or Mixed. Encoder Input for Speed and Position Control |
|
RoboteQ SDC2150 - 2x20A 30V Motor Controller with Encoder Input |
12V to 50V DC. Dual 20A motor controller for 30 seconds. >50A per side for short bursts. | Radio Control Input, Serial Input, Analog Input | 2.6in (70mm) wide x 2.6in (70mm) tall x 0.75in (19mm) | Forward & Reverse Speed Control. Separate or Mixed. Encoder Input for Speed Control |
Schematics
Below are some schematics that may not apply directly to what you wish to do, but will give you a starting point or you can use pieces of it:- ATR Power Schematic
- Running NiMH in parallel recommended schematic
- 2 MD03s in 0-5V Mode with a reverse bit controlled with a OOPic-R and a SDR Wireless controller
- 2 MD03s in I2C Mode controlled with a OOPic-R and a SDR Wireless controller
- MD22 in I2C Mode controlled with a OOPic-R and a SDR Wireless controller
- 6 SDR PWMs for 6 motors controlled with an OOPic-R and a SDR Wireless controller
- Hookup of a Custom Sabertooth to a Spektrum Radio
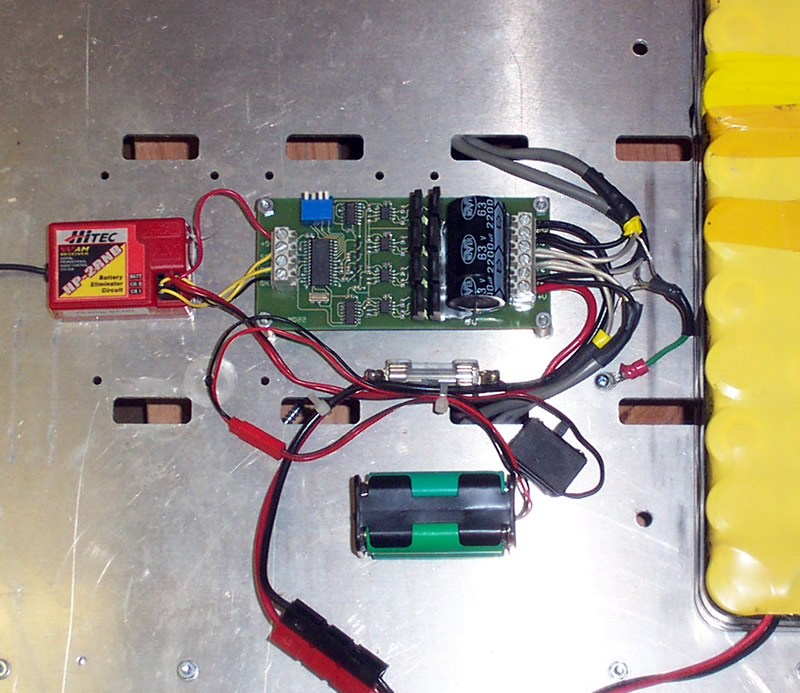
Hooking Up SuperDroid Robots PWM to a RC Controller


|
Our PWM motor controller can be hooked up to our RC Interface board to allow you to control motors with a standard RC unit. We sell a PWM to RC Hookup Kit that connects 2 PWMs to the RC interface board as shown in the picture to the left. This is our preferred way of controlling a robot with a RC controller and seems to work the best out of all the other methods that we have tried. The top picture is using 1 PWM per pair of motors on our mini ATR, the bottom picture uses a single PWM per motor for our Deluxe ATR. The boards are labeled, you just hook up the brake lines, PWM lines, and Direction Lines together. Wire the PWMs with power, and plug in the receiver to the RC interface board. |
Hooking Up and OOPic II/II+ Expansion Board to the MD22
The MD22 can be easily hooked up to an OOPic II/II+ using the Trekker Expansion board and our single ended jumpers to go from the servo headers of the expansion board to the terminal block of the MD22. Or you can build custom connectors with receptacles to go from the servo headers of the Trekker Expansion board to the MD22. You can also hook up to the I2C connection or you can drive the MD22 with any servo I/O pins using the oServo object. The advantage of this is you then end up with an interface board that allows you to hook up all the I/O the Trekker Expansion board supports.Hooking Up and OOPic-R Expansion Board to the MD22
The MD22 can be easily hooked up to an OOPic-R using the Trekker-R Expansion board and our single ended jumpers to go from the headers OOPic-R to the terminal block of the MD22 allowing you to still use all the features of the Trekker-R Expansion board/OOPic-R. Or you can build custom connectors with receptacles to go from the headers to the MD22. You can hook up to the I2C connection or you can drive the MD22 with any servo I/O pins using the oServo object. The advantage of this is you then end up with an interface board that allows you to hook up all the I/O the Trekker-R Expansion board supports.Hooking up the MD22 to the OOPic II/II+
The MD22 can be easily hooked up to an OOPic II/II+ by using our double ended jumpers to go from the headers of the OOPic to the header of the MD22. You can hook up to I2C connection or you can drive the MD22 with any of the I/O Pins using the oServo object.As an Extension to this hook-up you can utilize the Trekker OOPic II/II+ Expansion board and drive the MD22s using the servo outputs or I2C and you get all the great features of the expansion boards and your robot will be just like a Trekker only bigger! You can add all the sensors, etc. that the expansion boards support and most of the programs for the Trekker will be applicable. See our controller hook up page for more details. These kits also provide you with battery trays for your controller power.
Hooking up the MD22 to the OOPic-R
The MD22 can be easily hooked up to an OOPic-R by using our double ended jumpers to go from the headers of the OOPic to the header of the MD22. You can hook up to I2C connection or you can drive the MD22 with any of the I/O Pins using the oServo object.As an Extension to this hook-up you can utilize the OOPic-R with an Trekker OOPic-R Expansion board and drive the MD22s using the servo outputs or I2C and you get all the great features of the expansion boards and your robot will be just like a Trekker only bigger. You can add all the sensors, etc. that the expansion boards support and most of the programs for the Trekker will be applicable. See our controller hook up page for more details. These kits also provide you with battery trays for your controller power.
Hooking up the MD22 to the CM02 RF04 Transceiver Link
 |
The MD22 can be easily hooked up to an CM02 R04 by standard wire from one terminal block to the 4 pin headers on the CM02. You will want some crimp receptacles to attach the wire to the header. Other devices like a compass or SRF08 can be attached to the CM02 Header too. |
Hooking up the MD22 to a standard RC system
 |
The MD22 can be easily hooked up to a standard RC Receiver with wire from one terminal block to the 3 pin headers of an RC Receiver. You will want some 3-ping crimp receptacles to attach the wire to the header. |
