This is a compact robot that utilizes three omni-wheels to vector it in any direction. By changing the speeds and directions of the motors the robot can drive in any direction without needing to turn. This makes it very useful for navigating around the house. It works on any indoor surface or outdoors in short grass, pavement, concrete, etc.
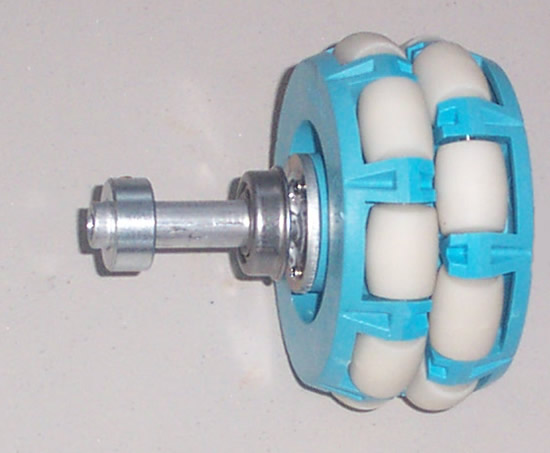
As pictured the Tri-Wheel Omni Robot has Omni-Wheel and Shaft Set - Double Row - TD-022-002 installed.
The picture below shows a Tri-Wheel Omni wheels robot with the following: three(3) sweeping IR sensors mounted on servo standoff hardware kits. The sensors and batteries are mounted on an upper deck Triangular base with  all thread spacers. Two 12V 1500 mAHr batteries are used in series to power the motors and one 9.6V battery is used to power the OOPic-R. The OOPic-R controls the sensors, servos, and motors to drive the robot around looking for the best path while avoiding obstacles. The single row omni wheels are used.
all thread spacers. Two 12V 1500 mAHr batteries are used in series to power the motors and one 9.6V battery is used to power the OOPic-R. The OOPic-R controls the sensors, servos, and motors to drive the robot around looking for the best path while avoiding obstacles. The single row omni wheels are used.
For full details and descriptions of the Tri-Wheel Vectoring Robot see our Tri-Wheel Robot Building Page . Additionally, you can see our general Vectoring Robot and ATR page for videos of the Vectoring Robot in action.
When you purchase this kit you will get access to download our assembly manual upon checkout. The manual contains color images and step by step instructions, or you can opt for us to assemble it for you.
See our ATR Robot Building Page for additional options and links to our controllers, sensors, and additional batteries. Don't forget to get your battery chargers either. The different chargers are explained on our Tri-Wheel Robot Building Page also.