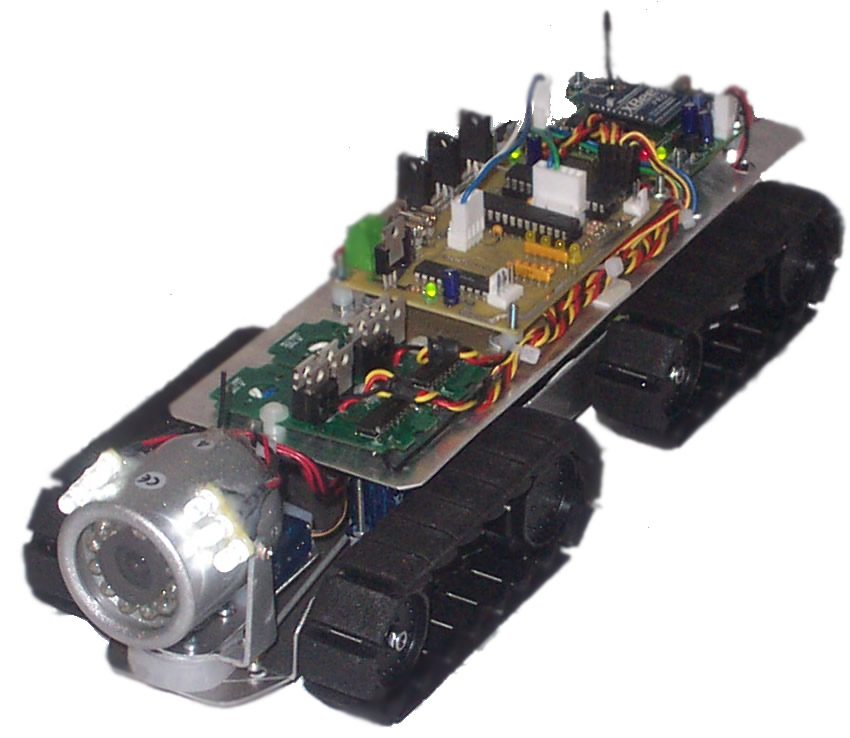
Pipe Inspector. Weighs <2lbs fit into a 5" Pipe. IR Camera with LED headlights, wired or tethered mode controlled from a PC. Made for inspection of Pipes and temperature monitoring. |
Robots of all Sizes |

Ghost Hunter Chamber Base: Platform designed to hold a 3'x3'x6ft tall 200lbs chamber. Robot Weights ~200lbs with long run batteries, AC inverter, built in charger. Measures 3ft x 3ft x ~1ft tall. See Video of finished product here. |
|

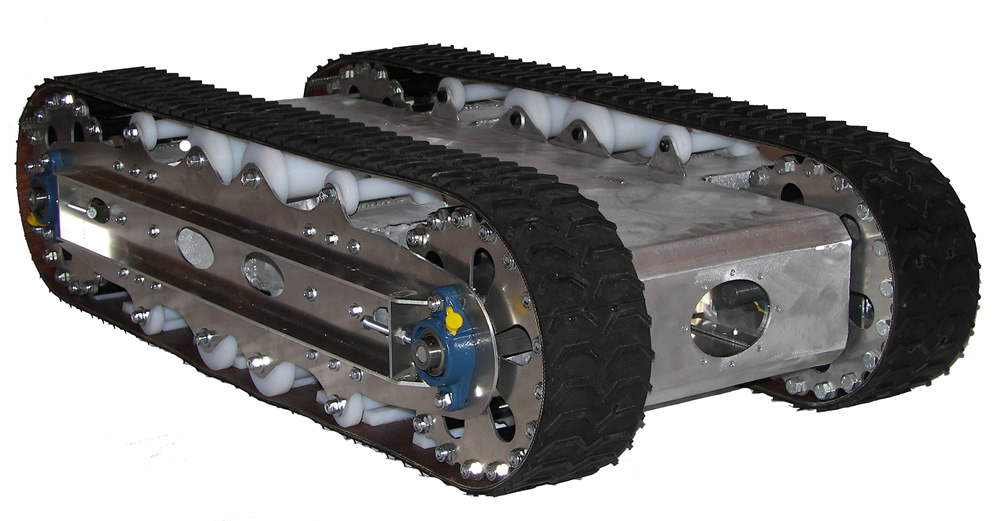
Industrial X-Ray transporter. 2200lbs, 7ft long, 4ft wide, 3ft high. 1ft wide Tracks. Twin 7.5HP Motors. 2000lb+ payload capacity. 10,000lb+ towing capacity.
YouTube Testing Video |
|
|
 |
Robots with Altitude... |

This is our LT Treaded robot with a 8 foot lift mounted on it. The camera on top pans more than 360 degrees and has 110+ degrees of tilt. The lift collapses to less than 1 foot total height. See the YouTube video here.
|

The robot pictured above (collapsed) and to the left (extended) was a camera boom mounted a 6WD robot platform with a 360+ degree swivel base, and a 110+ degree tilting head. The robot was able to look over obstacles ~4 feet tall. The robot was WiFi controlled with an IP camera mounted on the top of the arm. |

The Robot above is a scissor lift mounted on a 4WD ATR. A camera pan and tilt was mounted on top. The robot was RC controlled. |
|
 |
The remote presence robot or telepresence robot is a robot that can be controlled over the internet via their wireless network. The robot is used as a remote presence for a employee that can not come to the office. It pictured robot was designed specifically for a customer and weighs over 200lbs and is about 4.5 feet tall. The robot is controlled by the remote user who also has a web camera at their location. Their face is displayed on the 17" LCD monitor. The robot has an Axis PTZ camera that allows the remote user to see what the robot sees. The robot also has ultrasonic sensors, bumper switches, and battery monitor so the remote user can easily control and monitor the robot. The remote user uses the robot instead of himself/herself being physically present at the office. The robot moves around the office, attends meetings, etc. The robot is equipped with an onboard battery charger, computer, controller, and can be plugged in when its not being driven. It will run more than 8 hours on battery power.
SuperDroid robots is now offering a remote presence robot as a standard item. Please see our support page for more details. |
 |
|
 |
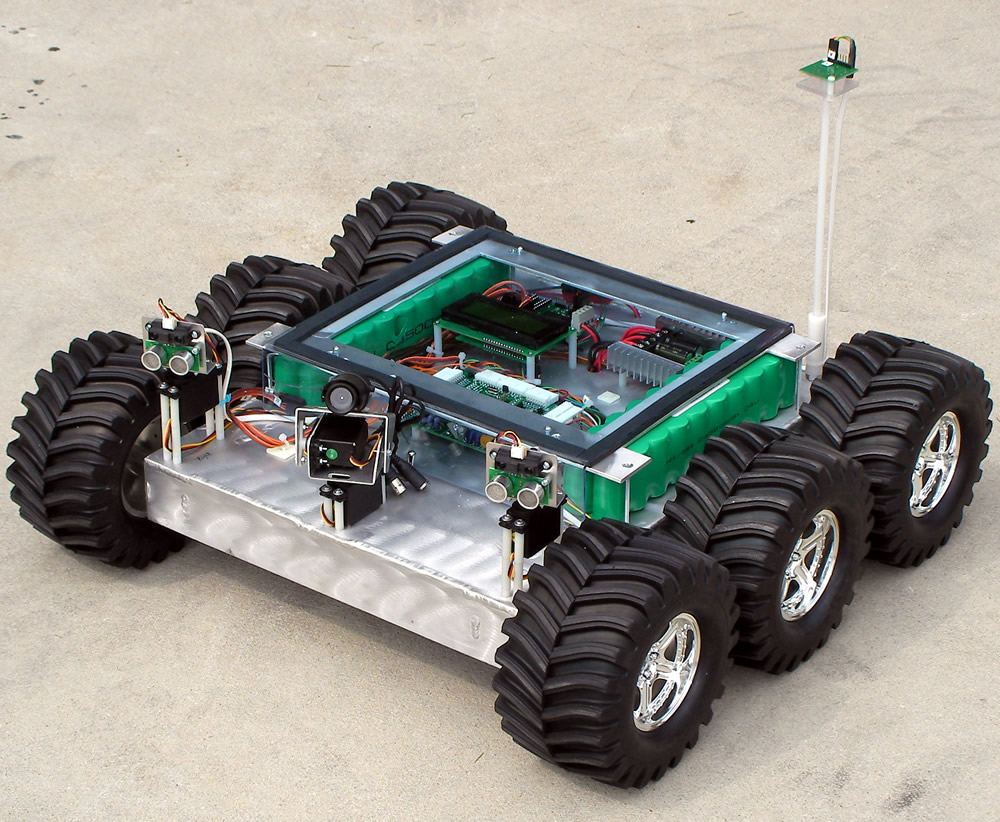
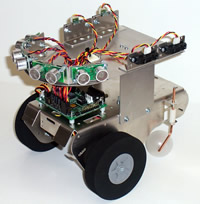
The Robot on the left is our standard IG42 6WD robot powered by two 24V battery packs and controlled with an Atmel ATmega128. The autonomous robot has RC override and includes dual channel wheel encoders, compass, 4 line LCD, sweeping ultrasonic and IR sensors, Camera Pan and Tilt, and more... |
An industrial company requested a robot that could be controlled wirelessly and receive video wirelessly, It also had to have a wired (tethered) mode for going into areas where RF was not possible. We designed a 6WD robot that was controlled with a gamepad controller. In wireless mode the gamepad controller was plugged into a 900Mhz data modem for control and a 5.8GHz video system. In wired/tethered mode a Cat5e Network cable could be connected between the robot and the controller. The camera has a heavy duty 360+ degree pan and tilt system with a high resolution low light 30x optical zoom camera. |
 |
|
| This robot was one of the more unusual robots we have made. A company in Africa wanted a robot that looked like turtle, but had a high resolution camera on a pan and tilt system. The robot is controlled wirelessly as it recorded video that was received wirelessly. The undercarriage of the robot is 6WD. The turtle shell was made from a aluminum wire cage covered with foam and fiberglass then painted to look like an African turtle. |
 |
|
 |
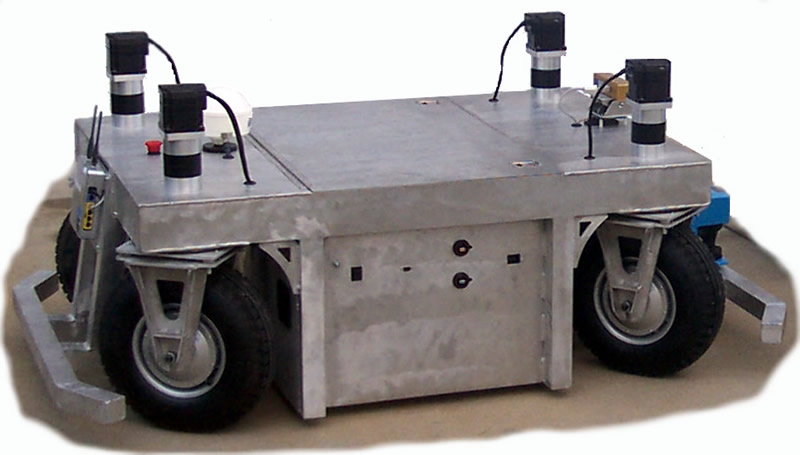
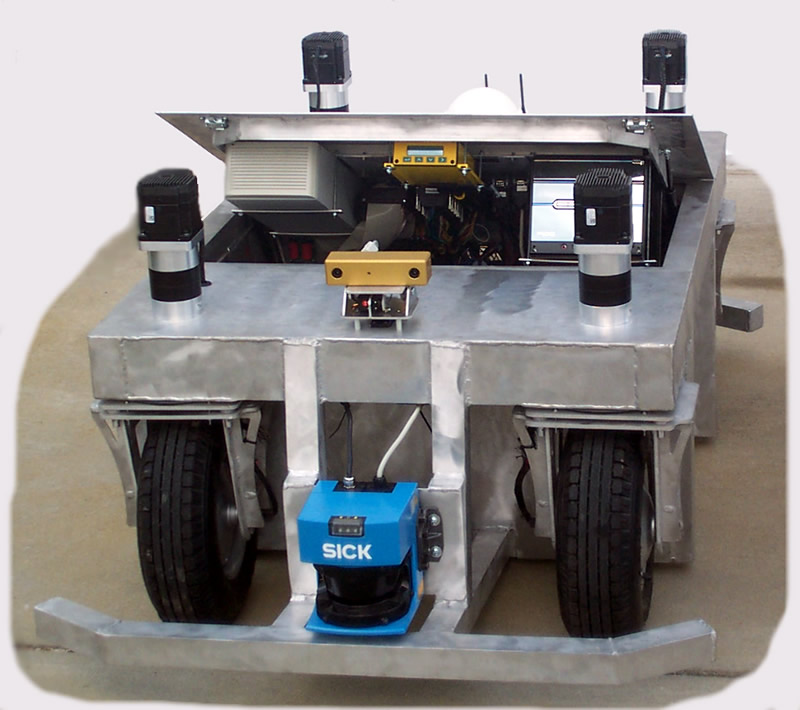
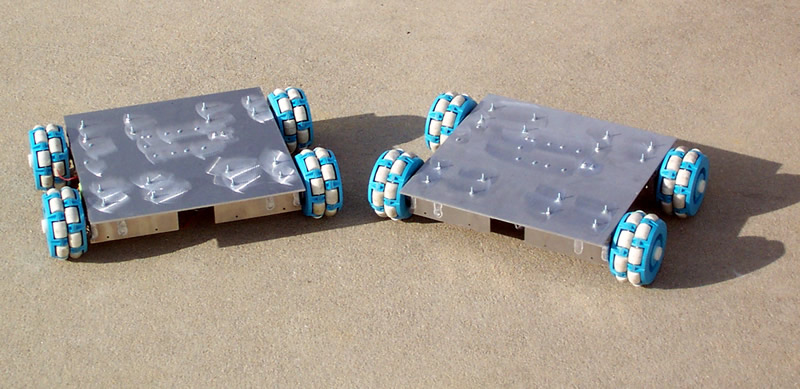
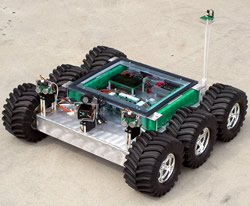
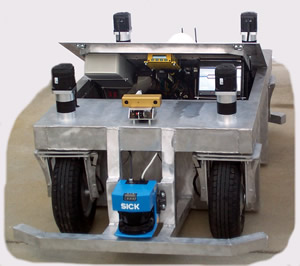
DSpace Inc requested us to design and build this robot chassis (about 3 ft wide, 2.5 ft high and 6 ft long, weighing about 600lbs each). We also mounted all the components and supported the wiring and startup. Two units were built. The robots have 4 hub driven wheel motors. Each wheel turned independently via geared stepper motors. The wheels turned more than 180 degrees allowing the robot to traverse sideways. The unit had a Ladar unit, stereo camera, onboard computer, wireless router, GPS, and more. |
 |
 |
 |
|
 |
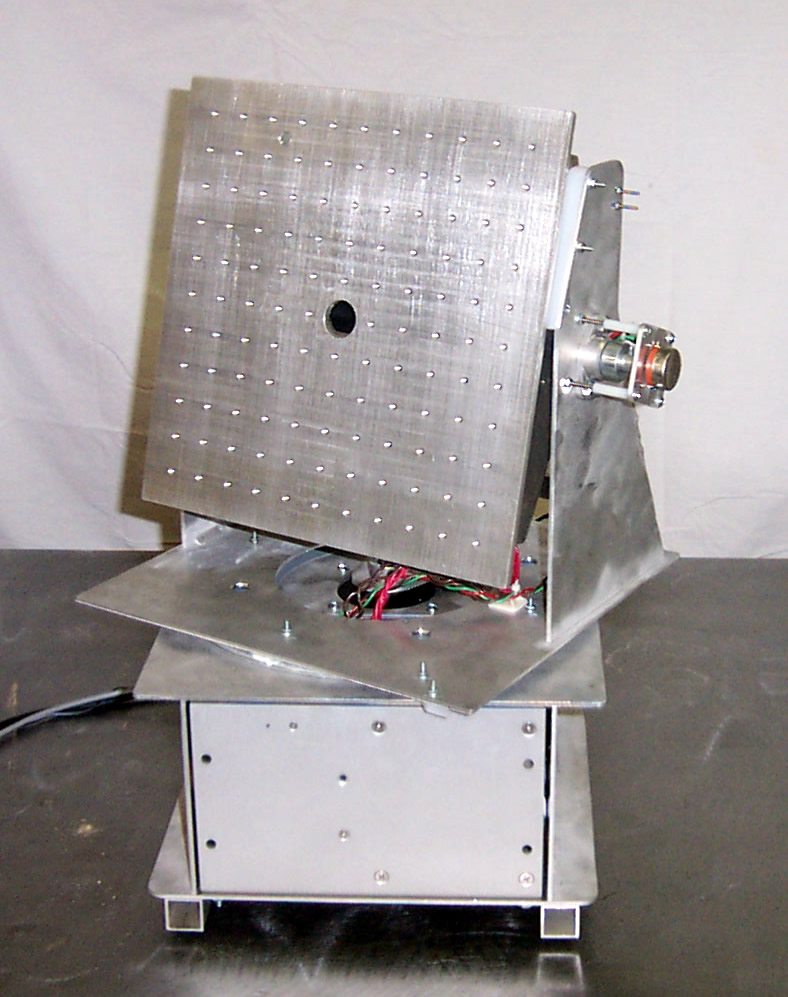
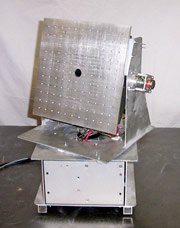
After seeing our other custom pan and tilt system (lower on this page) a company contracted us to make a larger pan and tilt system that is also driven by stepper motors. The power supply 48V @10 Amps is contained in the base of the system. The stepper controllers and custom microcontroller are also built into the base of the pan and tilt system. Here are two QuickTime videos of the completed system:
|
 |
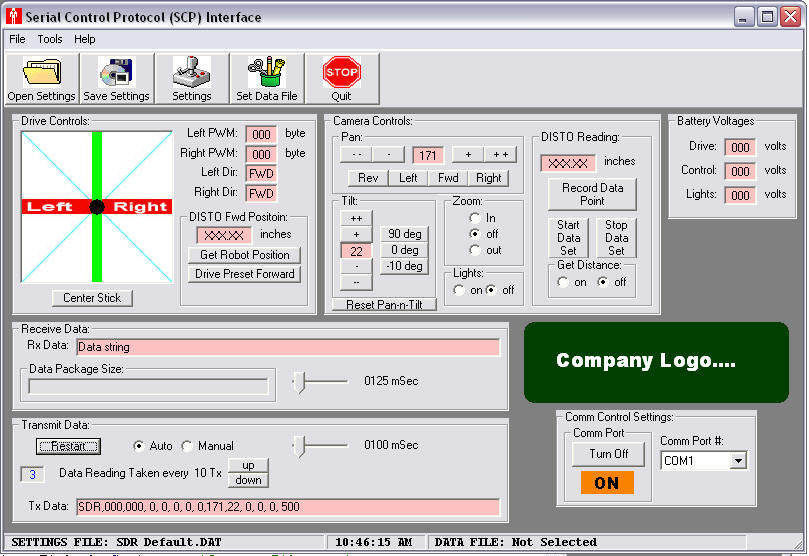
Custom Control Program to control system form a PC over a serial port. |
|
Concept CAD image of drive train of a house robot. |
 |
A company requested a prototype robot that was a couple feet tall and round. The Robot was controlled from a PC using our wireless modem for control with use of a custom PC program. The camera system included one of our standard wireless cameras mounted to our pan and tilt system. The custom program we wrote captured the video and displayed the live images on the computer monitor. The robot could easily be driven around the house from a PC. |
 |
|
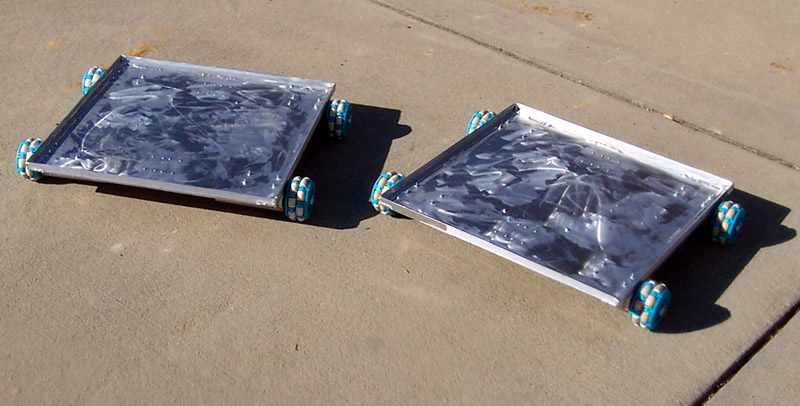
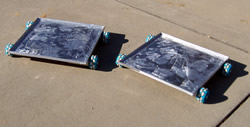
| We have built robots for Hollywood and Broadway. We built a robot platform for Nickelodeon's Ned's Declassified School Survival Guide. We have also built robot platforms for a Broadway show. After receiving two larger platforms, they liked them so much, the ordered another two smaller platforms. The platforms could carry a couple hundred pounds each and were RC controlled. |
 |
 |
|
|
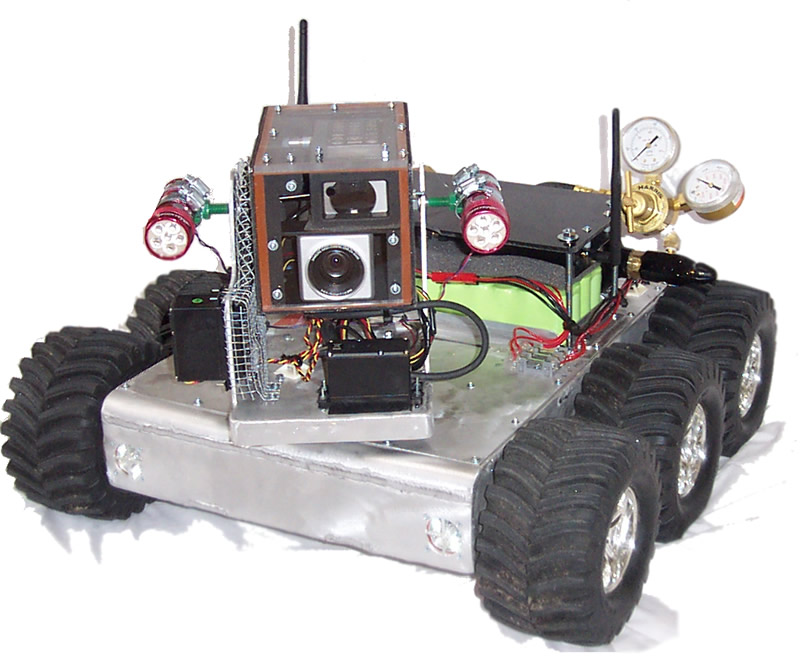
A company requested a robot to inspect confined spaces. The inspection involved sending the robot in and video recording. The robot was also equipped with a laser distance meter that would pan and tilt (360 pan, -10 to +95 tilt) with the camera and record all the data. A program was written to autonomously drive the robot forward, position the camera and laser, then record the data on a PC. All the control was wireless from the robot to the PC. The robot could be manually driven from the PC too. Due to the confined space requirements the robot was water tight and also had an inert gas purge to keep the electronics cool and prevent condensation. The entire system was needed in less than two weeks, so we retrofitted the camera and gas purge system onto one of our existing robot platforms. |
 |

Computer Interface Screen shot |
|
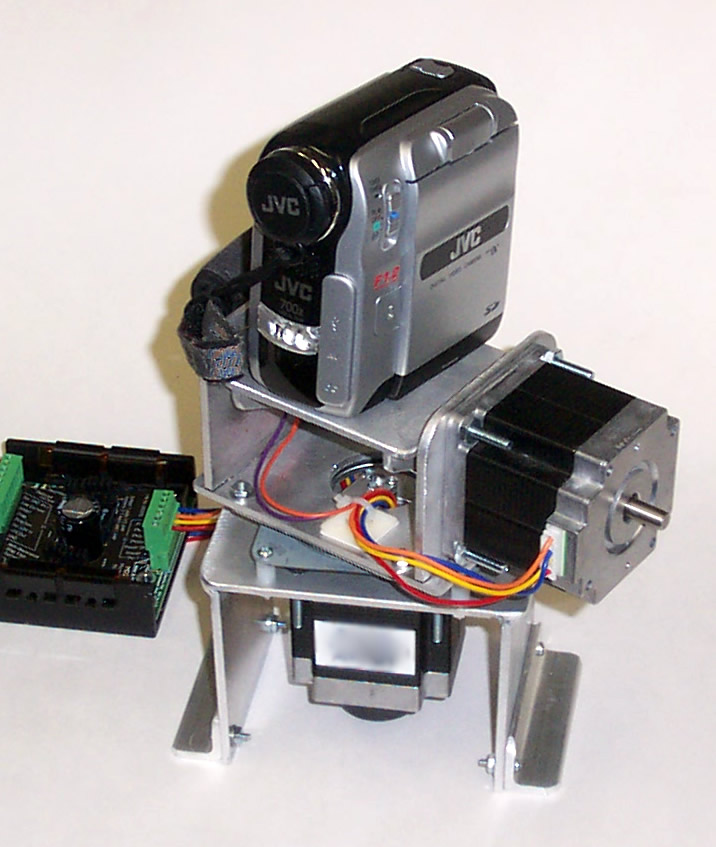
| A UK university wanted a camera pan and tilt system that provided very accurate positioning. A stepper motor pan and tilt system was designed and built. The stepper motors were controlled with a micro stepper controller that allowed accurate positioning to fractions of a degree. |
 |
Pictured to the right is the finished system. We took some videos of the system. The system could pan more than 360 degrees and the tilt was capable of more than 45 degrees in each direction.
Small Video (250kB)
Medium Video (1.8MB)
Large Video (5.6MB) |
 |
|
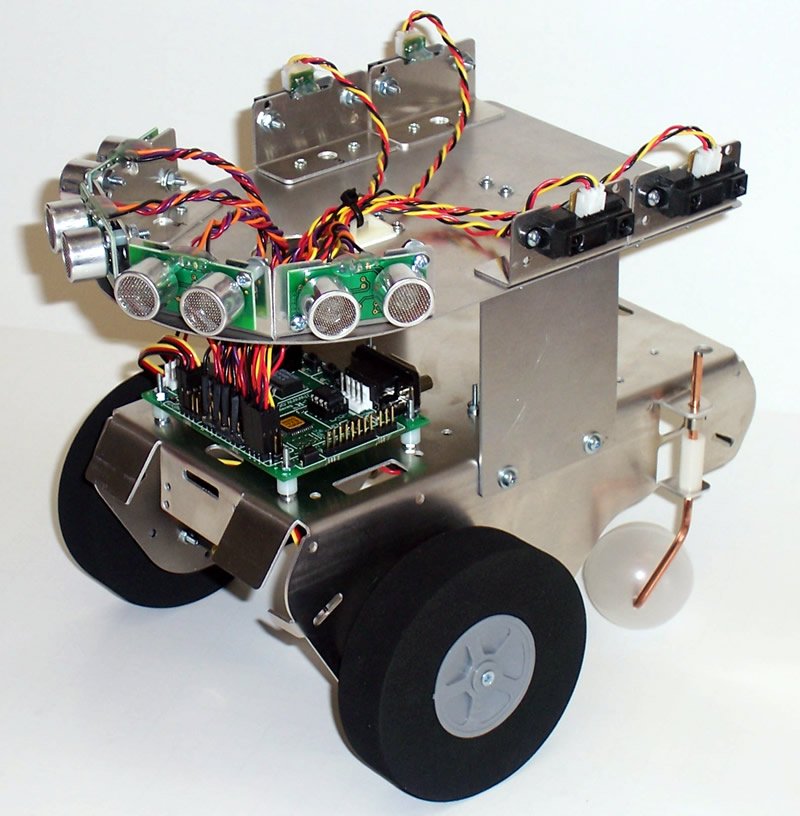
| A university research department wanted a custom Trekker and provided us a CAD drawing of the sensor array desired. |
 |
This photograph shows the robot upon completion. |
 |
|
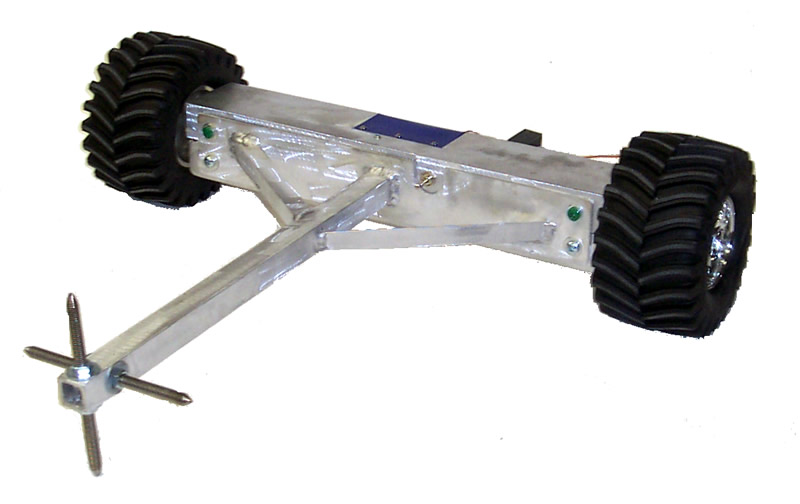
| A training school client wanted a 15lb BattleBot built rapidly. We provided a CAD rendering and a proposal |
 |
Less than 2 days later, the customer had his BattleBot! |
 |
| We've also made countless custom RS232 to TTL converter cables.
and many more projects... Contact us if you need our help with your project! |