|
|
|
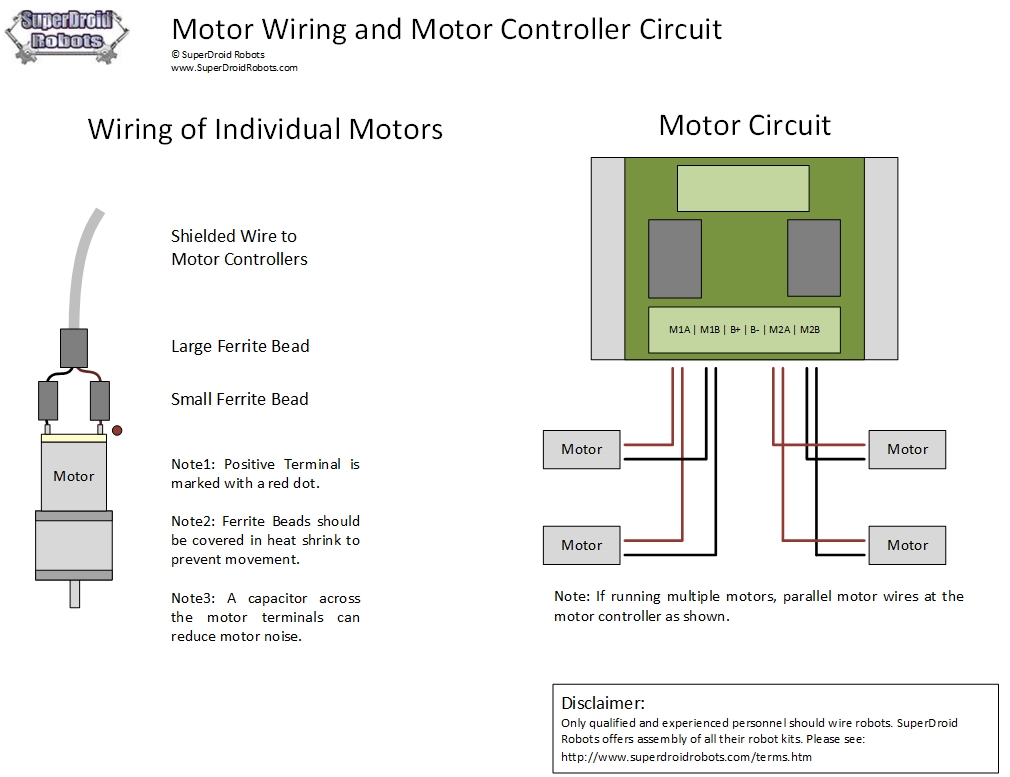
Motor Wiring GuideIntroductionWhen using electric motors, one of the most important things to consider is motor noise. We sell several DC motors for our ATR and Vectoring Robot kits. With these motors we recommend you get a motor wiring kit too. The motor wiring kit provides protection and helps knock down the majority of the noise the motors put out. There are a lot of schools of thought on how to control the noise, Below is what we have found to be the best practice for motor noise suppression. A diagram showing proper motor wiring can be found at the bottom of this page.
Sections on this page:
 
Capacitor FiltersA capacitor is a voltage storage device. They are frequently used to reduce noise by smoothing out voltage waveforms. The sizing of the capacitors isnt entirely critical in this specific application. Weve found that anything greater than 1uF doesnt produce much of a difference in motor performance. The suggested places to employ capacitor filters are:
Shielded CableWhenever you are connecting to noisy devices or if you need to run cable near noisy devices, it is always recommended to use a shielded cable. Shielded cables help reduce the amount of noise absorbed over the cable run. Ferrite BeadsFerrite beads are often used in electronics to reduce electromagnetic interference (EMI). Long conductive cables can act as antennas and produce radio frequency energy and the addition of a ferrite bead to this antenna greatly helps to break the EMI field produced by the cable. When using ferrite beads on cables it is recommended to use the minimum sized heat shrink that will fit around.
Additional RecommendationsCheck for ground loopsWhat we measure as voltage is the electrical potential difference between two points, normally with one being ground. Having multiple paths to ground will create noise due to the existence of multiple reference points. Don't run lines parallelShielded cable is best as discussed above. Also its important to try to keep signal lines and power lines separated and try to run them perpendicular. Twisting positive and negative power lines together is also a good practice to keep noise down (putting the wires in the electric drill is a good trick to twist the wires quickly and get a good tight twist. Wiring Multiple MotorsWhen wiring multiple motors to a single motor controller channel always be sure to run your wires from each motor terminal directly to the output of your motor controller. Multiple motors can be run in parallel to the motor controller. ie a 6WD robot with 6 motors will have the 3 left motors run in parallel to once side of the motor controller, the 3 right motors would be run in parallel to the other side of motor controller. Sometimes when running multiple motors in parallel, the capacitors may cause errors with the motor controller, in which case try to remove capacitors from one motor at a time until the motor controller stops erroring. Isolate Power SuppliesHaving separate sources of power for your motors and the rest of your electronics will isolate your electronics and minimize the effect of motor noise. Connection to an IG52 or a Motor with EncoderWhen making connections with our larger IG-52 motors, or our motors with encoders, the motor terminals themselves are not accessible. For these motors it is NOT necessary to attach a capacitor across the motor leads.  
Connection to a Motor ControllerFor most wheeled robot applications, it's desirable to have more than two motors. To minimize motor noise it is advised to run individual shielded cable from each motor to your motor controller. For example, if you have two motors per side, the positive (red) motor wires on the left will both go into terminal M1A while the positive motor wires on the right side of the robot will go into M2A. Please see the image below for a more detailed description.
|
|
|
Robots, Parts, & Custom Solutions

##GOOGLEPLUS##
##PINTEREST##